本网讯(通讯员 翟莹)12月17日,由共青团中央、工业和信息化部共同主办的2023年全国大学生机器人科技交流营暨机器人大赛在山东日照举行。我校选送的3件作品全部进入终审决赛,并从入围终审决赛的221件作品中脱颖而出,全部荣获一等奖。获奖数量居湖北省高校第一。

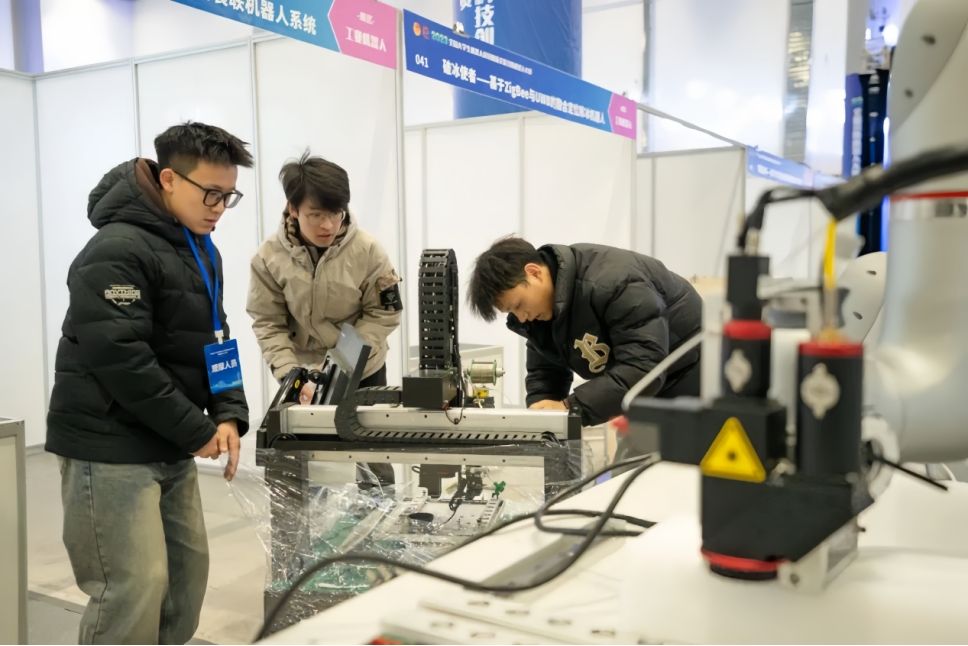
我校参赛团队围绕工业机器人与其他应用领域机器人进行设计研究,通过现场答辩等环节,详细介绍了各自团队的机器人研究成果,展现了工大学子崇尚科学、追求真知、勤奋学习、锐意创新的品质和风采。

本次比赛于今年9月启动,依托校级科创比赛活动基础,学校积极动员,重点遴选3项作品参加决赛评选。赛前,校党委副书记李志旭就比赛备赛提出明确要求,指导老师与团队成员反复打磨作品,力求精益求精。此次选送的3件作品全部获奖,充分展示了学校师生科技创新的能力水平,为进一步培育学生科学创新思维,激发全校科技创造活力奠定了基础。学校将以此次比赛为契机,为学生提供更加优质的科创平台,引导青年学子在推进中国式现代化中绽放青春光彩。

获奖项目介绍
项目名称:面向电子装联领域的高端温控激光微纳装联机器人系统
获奖等级:全国一等奖
团队成员:陈瑶、石伦、李国豪、冷文龙、王强、闫宽、吴越、吴粤
指导老师:陈绪兵、张聪
所在学院:机电工程学院
项目介绍:面向电子装联领域的高端温控激光微纳装联机器人系统使用多自由度协作机械臂作为运动执行单元,具有更高度灵活的焊接角度,可以自由地调整焊接机构的姿态,从而根据不同焊点实现不同的焊接操作,足以适应多种复杂的焊接工艺。通过引入高速响应模糊PID温控反馈技术、多光路同轴光学技术、基于深度学习的焊点实时控制、定制化图像处理技术、针对复杂焊点的机械臂控制技术等技术,实现了激光软钎焊焊接机器人的非接触焊接方式、闭环温度控制、焊点自动识别以及离线路径规划、自动工艺参数修正等重要功能,使焊接的良品率与效率得到了大幅度提升。

项目名称:电子海鸥--水陆空协作智慧平台及水域立体化监管网络系统
获奖等级:全国一等奖
团队成员:郭晶鑫、周攀、李紫宁、周倩怡、段懿桐、宋希儒、宗亚萍、熊梓林
指导老师:张哲、卢涛、张聪
所在学院:计算机科学与工程学院、人工智能学院
项目介绍:项目以海鸥的习性为灵感,立足长江大保护战略,面向传统的“海巡艇+人力”方案现状痛点,创新性地提出了“基站+无人机”海空一体化监查这一解决方案,以应对复杂水域场景下的多种监管任务。基站不仅可以为无人机群与软件端的无线中继提供支持,也可为无人机提供基于磁耦合谐振式无线电能传输技术的能源保障。自主研发的水上能源与通信保障基站、监控中心软件和“海鸥”无人机设备之间系统耦合,构建了支持大面积水域布控的立体化监管网络系统。项目在多个指标中体现了方案科学性和技术先进性,在节能减排、降本增效等领域凸显较大优势,在无人机工作算法和能源保障技术两个方向持续产出科研成果。
项目名称:临渊号—面向大型油气管道的清洁机器人
获奖等级:全国一等奖
团队成员:刘可、向天赐
指导老师:龚程、戴耀南
所在学院:机电工程学院
项目介绍:本项目是一款面向大型油气管道的清洁机器人。它采用先进的清洁系统和垃圾收集系统,能够高效地清洁管道并将油污带出。机器人还具备自适应的变径结构和连续可变曲率系统,可以适应不同管径的管道,并具备容错能力。同时,它还拥有出色的视觉系统,针对管道内壁缺陷检测精度低、易漏检等问题,提出了基于改进YOLOv5的管道内壁缺陷检测算法,识别质量远超传统算法。在控制算法上,引入了欧式距离作为基,以RBF算法为基础综合设计了新的 IRBF神经网络学习对PID进行精细化的逼近,实现更智能更流畅的运动操作。
据悉,全国大学生机器人科技创新交流营暨机器人大赛是共青团中央、工业和信息化部共同主办的一项具有导向性、示范性和群众性的全国竞赛活动,是共青团服务大学生科技创新的重要载体。大赛坚持科创育人、实践育人导向,持续提升赛事引导力、影响力和公信力,瞄准机器人前沿技术动态、产业发展趋势和人才培养需求,激发大学生学习机器人知识、交流机器人技术、传播机器人文化、投身机器人行业、攻关机器人关键核心技术的积极性、主动性、创造性,推动机器人领域教育、科技、人才融合发展。本届竞赛共收到1017件参赛作品,分别来自全国30个省、自治区、直辖市及新疆生产建设兵团的431所高校。经网络初审,共有221件作品入围终审决赛。
(审稿 邓欢)